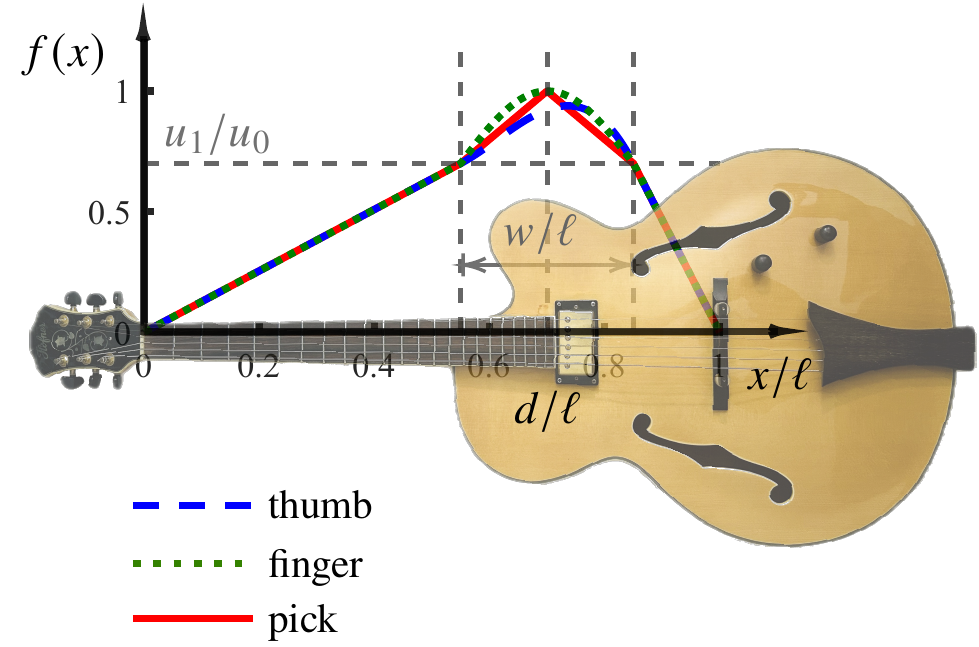
The thumb, finger, and pick are described by \begin{align}\label{eq:source:g} g(x) = \begin{cases} \operatorname{thmb}(x) &\!\!\!\! \equiv s_0 + s_1(x/\ell) + s_2(x/\ell)^2 + s_3(x/\ell)^3\\ \operatorname{fing}(x) &\!\!\!\! \equiv (1-u_1/u_0)\cos[\pi (x-d)/w] + u_1/u_0\\ \operatorname{pick}(x) &\!\!\!\! \equiv 1 - 2(1-u_1/u_0) |x - d|/w %\label{eq:pick}\\ \end{cases} \end{align}
Coefficients \(s\) are determined from requiring the smoothness of \(\operatorname{thmb}(x)\)